- HOME
- Business
- Industrial Robot
Industrial Robot
고위험·고강도 현장에 산업용 로봇을 적용하여 안전하고 생산성 높은 산업현장을 구축합니다. 포스코DX는 SW 기술을 중심으로 로봇 적용을 위한 컨설팅, 설계, 구축 및 운영에 이르는 로봇 자동화 서비스를 제공합니다.
Robotic Automation Specialist
- 로봇 제조사 협력과 공정 3D 설계 및 시뮬레이션을 통해 고객사 니즈에 맞는 로봇 자동화 시스템 설계, 구축, 운영
- 제조사 공장 자동화와 스마트팩토리 구축 경험을 통해 제어 시스템 및 설비 자동화 전문역량 보유
- 로봇 제어 플랫폼(ACS: 이기종 물류 이송 로봇 제어할 수 있는 SW 플랫폼) 등 기술력 차별화
-
공장 자동화(1980~)
-
스마트팩토리(지능화, 2016~)
-

로봇 자동화(무인화, 2022~)
표준 모델과 방법론 기반의 로봇 자동화
표준 공정 모델
로봇을 이용한 '공정별' 표준 모델 → 동일 공정 횡 전개 시 빠른 확산 가능
※ STS 제강 자동화 모델기반으로 4연주 자동화 수행
표준 기능 모델
로봇 작업의 '기능별' 표준 모델 → 신규 로봇 자동화 프로젝트 진행 시 재활용
※ 용강 Sample 채취 기능을 고로 출선구 용선 Sample 채취 기능에 재활용
서비스 모델
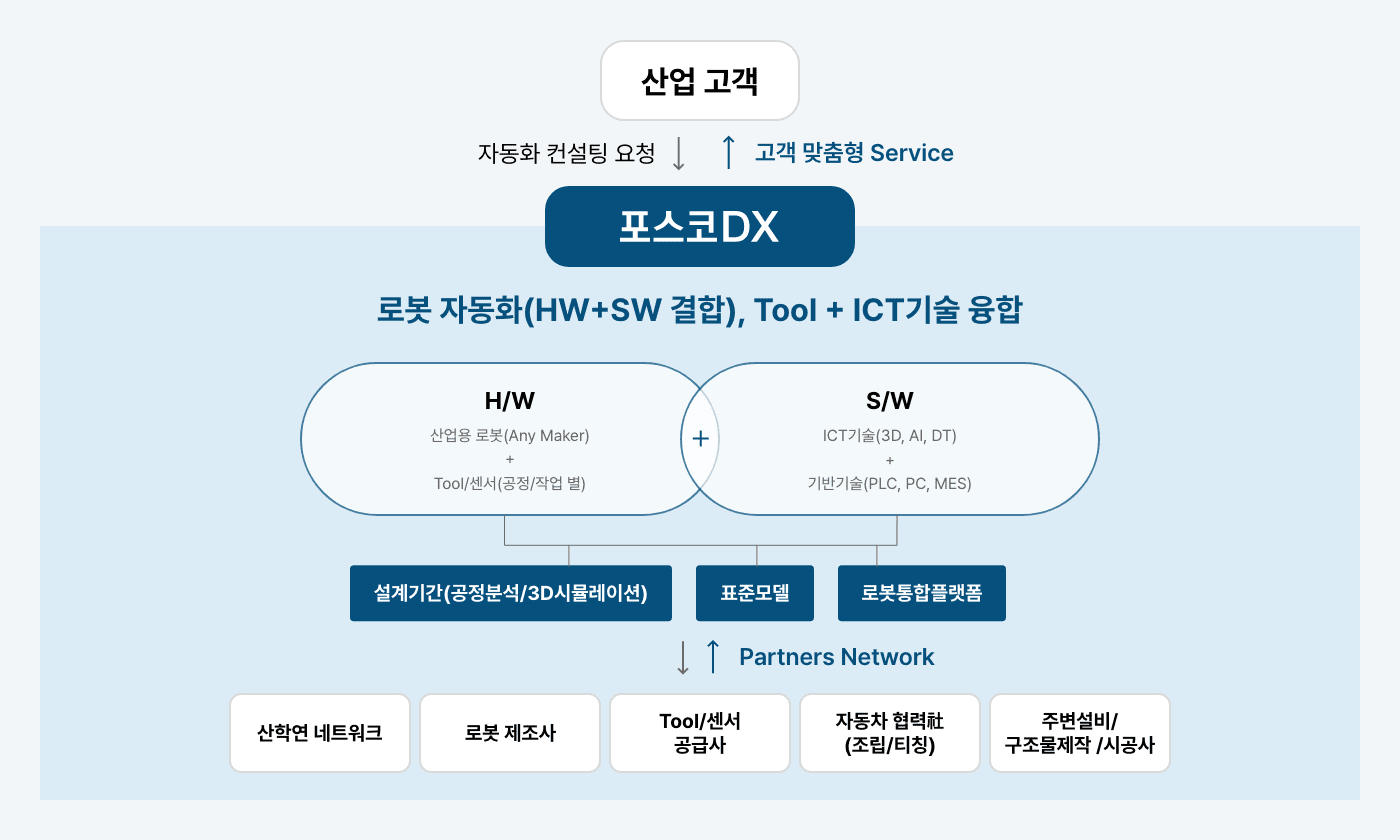
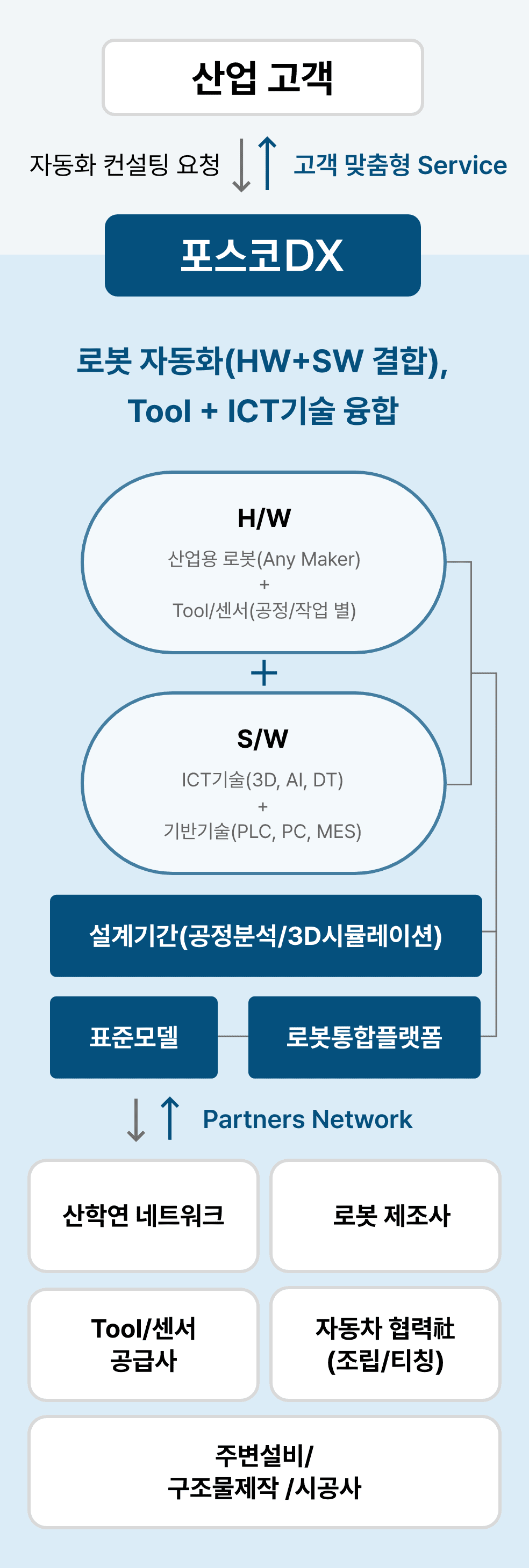
산업 고객 > 포스코DX : 자동화 컨설팅 요청
포스코DX > 산업 고객 : 고객 맞춤형 Service
- 포스코DX
-
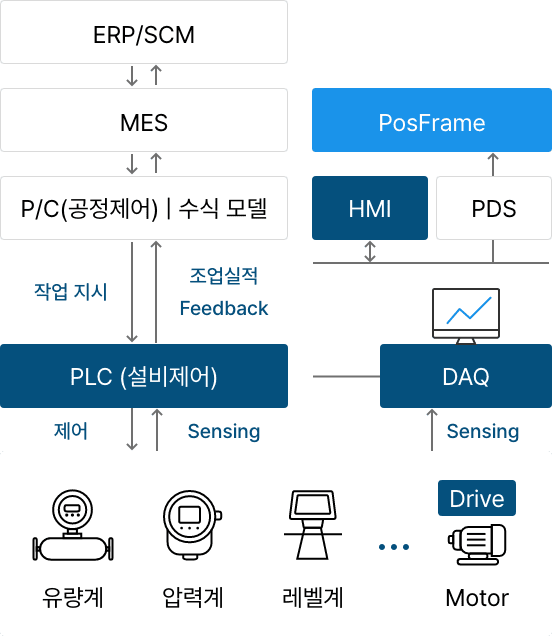
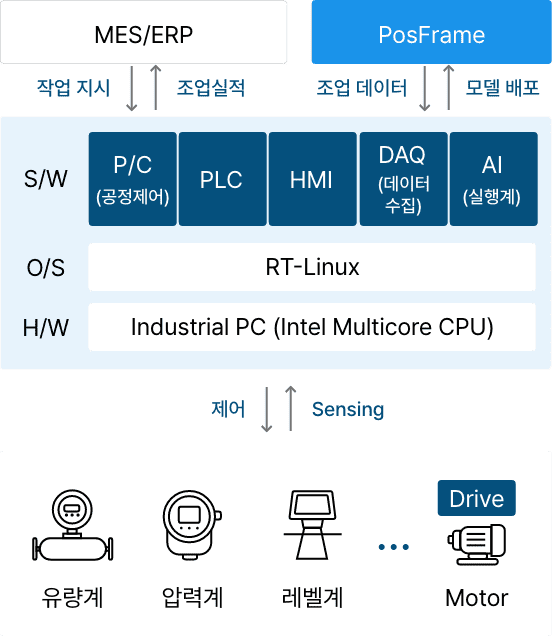
로봇 자동화(H/W + S/W 결합, Tool + ICT기술 융합)
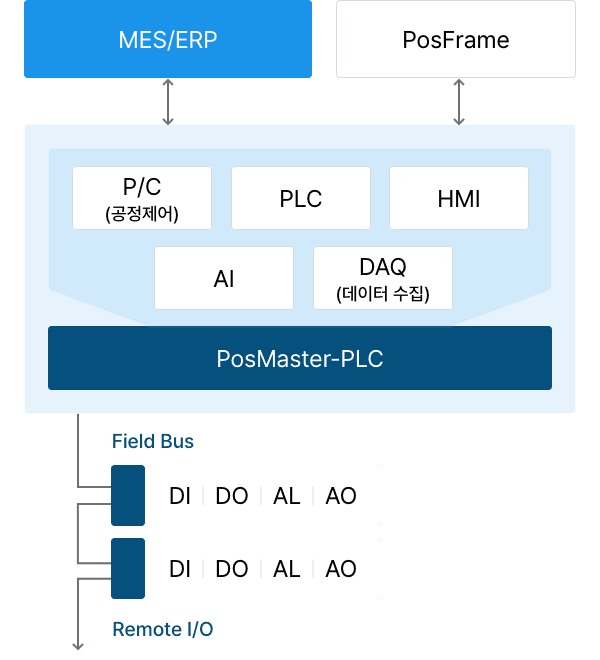
H/W (산업용 로봇(Any Maker)+Tool/센서(공정/작업 별)) + S/W (ICT기술(3D, AI, DT) + 기반기술(PLC, PC, MES))
설계기간(공정분석/3D시뮬레이션), 표준모델, 로봇통합플랫폼
Partners Network (산학연 네트워크, 로봇 제조사, Tool/센서 공급사, 자동화 협력사(조립/티칭), 주변설비/구조물 제작/시공사)
서비스 분야
제조 로봇 자동화
고위험·고강도 산업 현장의 안전한 작업환경 구성과 제조공정의 생산성 향상
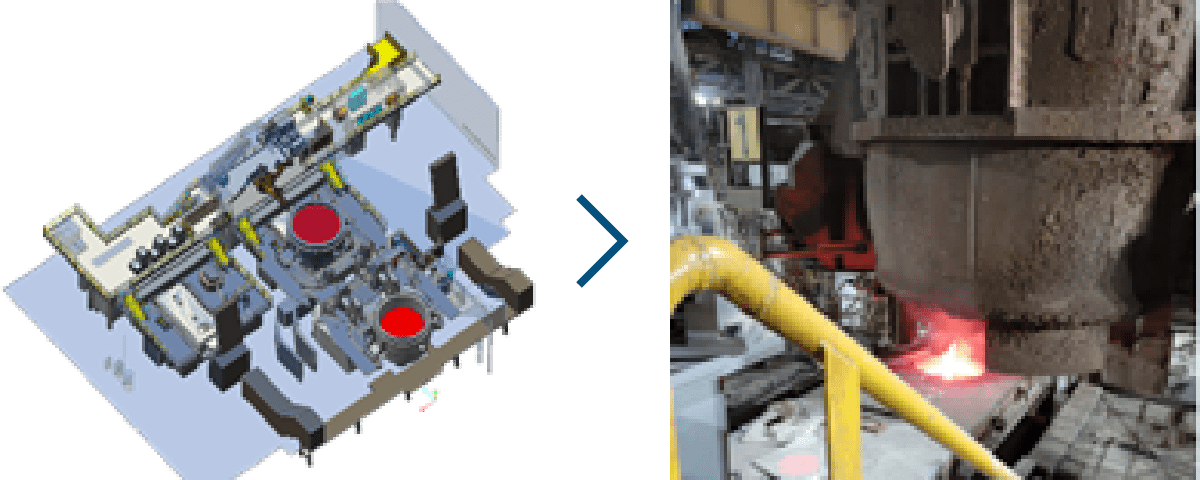
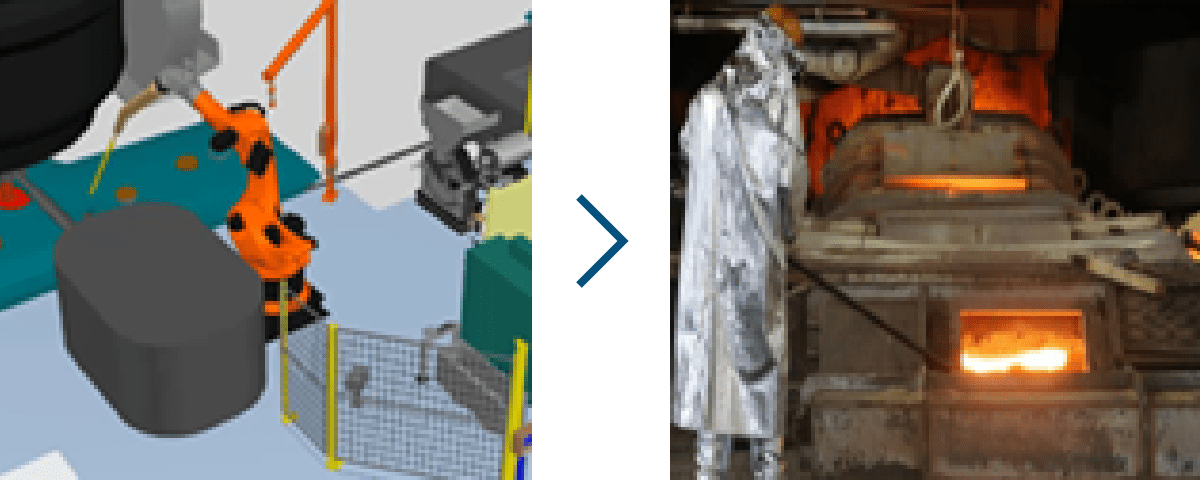
고위험 작업의 로봇 표준 모델 구축
- 3D 설계, 시뮬레이션, OLP 기반의 로봇 자동화 설계
- 現 공정의 이슈 분석, 개선안 도출, 자동화 설계 및 현장 작업 최소화
※ Ladle Man Deck 로봇 자동화, 도금 Dross 제거, Band Cutter 자동화 등
스마트팩토리 사업과 연계한 중견 제조 기업의 생산성 향상
기존 스마트팩토리 고객 대상, 검증된 로봇 자동화 시스템 제안
물류 로봇 자동화
입고 → 생산/제조 → 출하의 제조 공정에서 발생하는 창고, 공정 間 이동 자동화

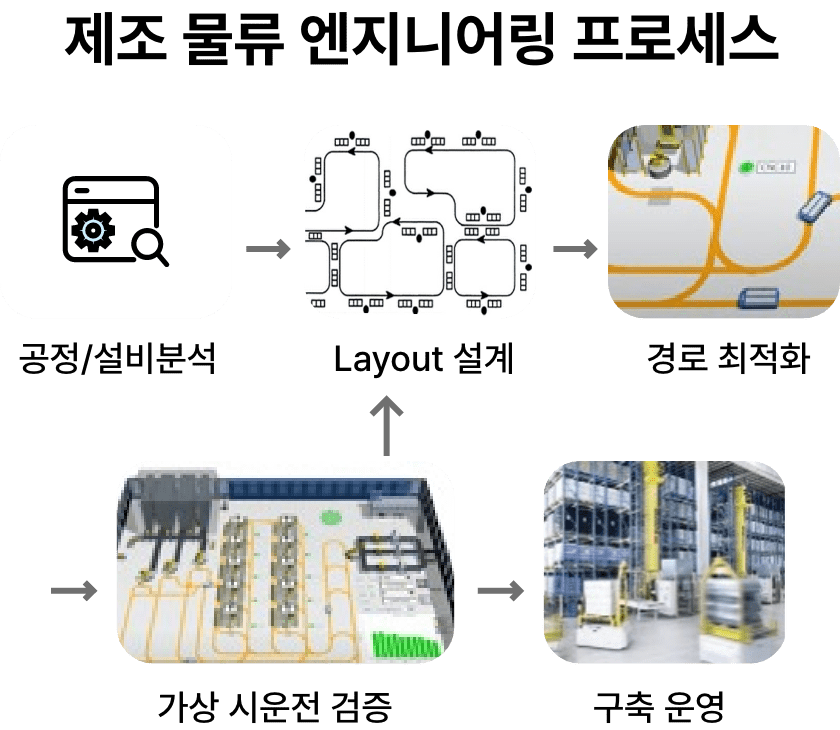
제조 물류 엔지니어링 프로세스
- 공정/설비분석
- Layout 설계
- 경로 최적화
- 가상 시운전 검증 ( > Layout 설계 단계)
- 구축 운영
공정분석 → 설계/최적화 → 가상 시운전 기반의 제조 물류 설계
포스코퓨처엠 불소성 공장, 소성공장 합리화
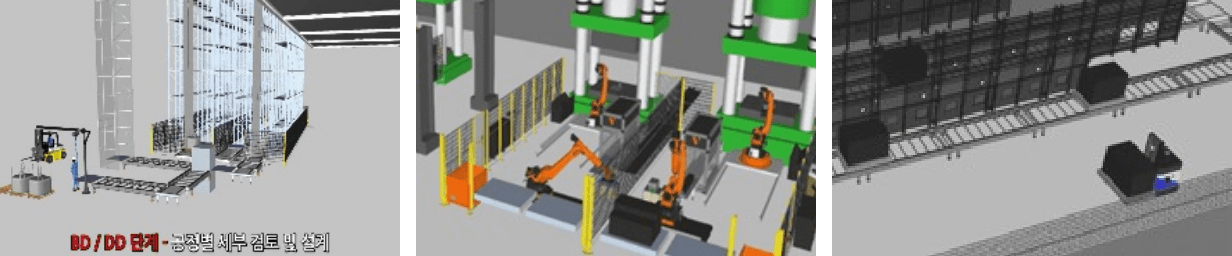 로봇 제조 물류 설계
로봇 제조 물류 설계
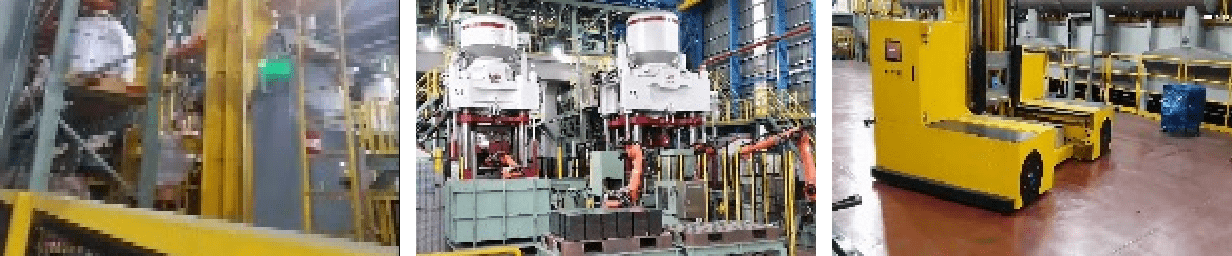 현장 적용
현장 적용
이기종 AGV/AMR 통합관제시스템(ACS) 보유
- ACS(AGV Control System) 중심 이기종 AGV 운영 및 모니터링
- ACS 적용을 통한 도입/운영 표준화
※ 포스코퓨처엠 양극재, PFC 등
차별화 요소
엔지니어링 기술 기반의 로봇 시스템 설계
3D 엔지니어링 기술로 설계 차별화
- 現 공정의 이슈 분석, 개선 아이디어 를 도출하여 To-be 컨셉 설계
- 3D 시뮬레이션 검증을 통한 프로젝트 실행 비용(시행착오) 감소
- 투자 타당성 검증(설비 가동률, 인력 감축 등) 및 시스템 제안
- 기술 자산화를 통한 타 프로젝트 실행 시 재활용
-
STEP 1 現공정 분석
-
STEP 2 실환경 3D 캡쳐
-
STEP 3 To-be 컨셉 설계
-
STEP 4 시뮬레이션 OLP
-
STEP 5 시운전 타당성 검증
ACS 중심의 AGV/AMR 최적 운용
데이터 기반 군집 제어 및 최적 운영 기술
- 제철소 및 그룹사 AGV 적용 확산에 따른 표준 I/F 및 구성 체계
- 주행 중 실시간 vehicle 혼잡 인지하여 동적 경로 변경 지원
- 단순 거리 아닌 최단 이송 시간 달성
- 물동량, 가동률 사전 분석을 통한 최적의 AGV Spec/대수 제안
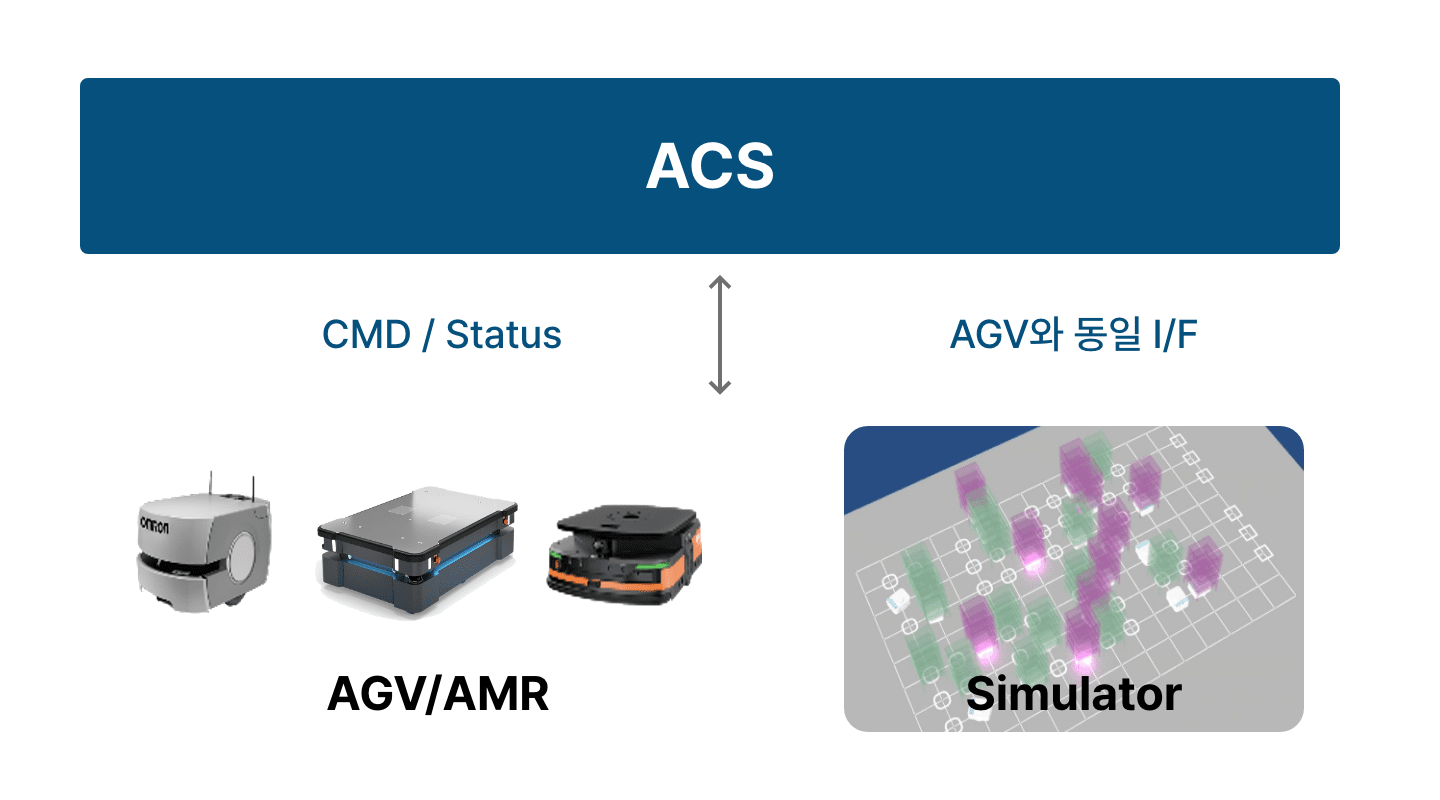
- 상/하위 시스템과 연동 가능한 미들웨어 설계
- AI 기반의 최적 물류 스케쥴링
브랜드/특성/규모별 협력사 Category化 및 협력체계 구축
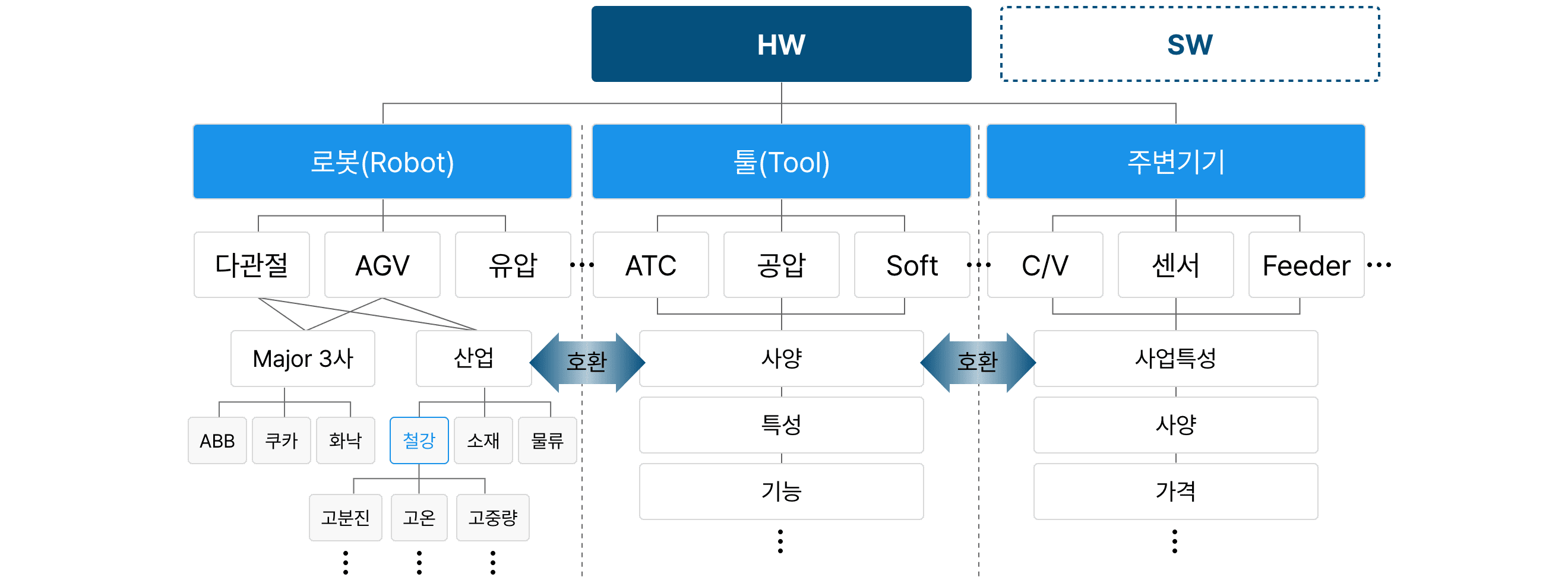
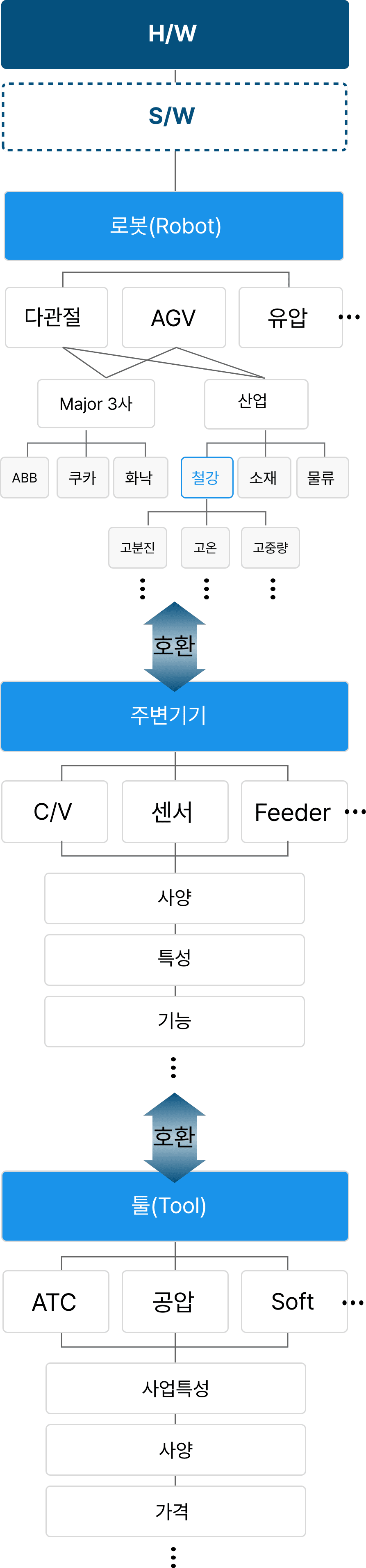
협력사는 HW와 SW로 구분되며, HW는 로봇(Robot), 툴(Tool), 주변기기의 세 분야로 나뉩니다.
- 로봇(Robot) : 다관절, AGV, 유압 등으로 구분되며, Major 3사(ABB, 쿠카, 화낙)와 산업 분야별로 협력체계를 구축합니다. 산업 분야는 철강(고분진, 고온, 고중량), 소재, 물류로 세분됩니다.
- 툴(Tool) : ATC, 공압, Soft 등으로 구분되며, 사양, 특성, 기능 등이 있으며 로봇, 주변기기와 호환됩니다.
- 주변기기 : C/V, 센서, Feeder 등으로 구분되며, 사업특성, 사양, 가격 등이 있으며 로봇, 툴 분야와 호환됩니다.
주요 실적
-
제조 로봇
- 포스코 포항제철소 냉연 코일 밴드커터 자동화
(코일에 체결된 밴드 제거 작업을 로봇으로 자동화) - 포스코 광양제철소 아연도금 Pot 드로스 제거 로봇
(고온(460℃) 아연도금 Pot 부유물질 제거 작업을 로봇으로 자동화) - 포스코퓨처엠 광양 양극재 공장 2단계 소성로 Saggar 교체 로봇
(양극재 소성로의 내화용기 교체 작업을 로봇으로 자동화)
- 포스코 포항제철소 냉연 코일 밴드커터 자동화
-
물류 로봇
- 포스코 광양제철소 HyperNO 전기강판 코일 AGV
(전기강판 Hyper NO 이송 자동화를 위한 65톤급 AGV 적용) - 포스코 광양제철소 PFC(POSCO Fulfilment Center) AGV
(중앙창고 Smart Fulfilment 구축을 위한 자재 이송 자동화) - 포스코퓨처엠 포항 양극재 공장 1단계, 2단계 AGV
(양극재 생산용량 증설에 따른 AGV 활용 원료 이송 자동화) - 포스코퓨처엠 광양 양극재 공장 5단계 AGV
- 얼티엄캠 퀘벡 양극재 공장 AGV
- 포스코 광양제철소 HyperNO 전기강판 코일 AGV